Freitag, 23 Januar, 2026
Vorgeschichte
Beim Stöbern auf der Project share Seite im Forum von Spark.IO bin ich auf dieses Projekt gestossen. Die Grundidee ist, einen LED-Streifen mit den individuell programmierbaren WS2812 LEDs spiralförmig auf einen zylindrischen Tubus zu wickeln. Bei geschickter Anordnung ergibt sich eine leicht geneigte senkrechte LED Reihe. Mit entsprechender Software lassen sich ausser Farbmuster auch Texte anzeigen. Die im Projekt gezeigten Tuben waren mir aber etwas zu klein. Etwas Grösseres musste her….
Spezifikationen
Die Leuchtfläche der Lampe sollte etwa einen Meter hoch sein. Im Sockel wird das Netzteil, im Kopf die Elektronik platziert. Da der Spark.core über WiFi ansprechbar ist, soll die Lampe übers Internet bedienbar sein.
Elektronik
Kernstück ist ein Spark.core. Es wird derselbe Typ wie im Originalprojekt verwendet. Aufgrund der grösseren Dimension dieser Lampe müssen einige Einschränkungen in der Software wegen des RAM-Speichers gemacht werden. Der Core sitzt zuoberst in der Lampe um guten Kontakt zum WiFi zu haben. Der LED-Streifen wird von unten angesteuert. Als LED kommt die Type WS2812(B) zum Einsatz. Diese LED ist kaskadierbar. Daten am Eingang der LED werden angenommen und bei weiteren Daten die vorhergehenden an die nächste LED weitergegeben. Das Ganze funktioniert wie ein Schieberegister. Überschreitet die Lücke zwischen zwei Datenfeldern eine bestimmte Zeit, übeträgt die LED den zuletzt empfangenen Wert in ihr eigenes Steuerregister und steuert damit deren RGB LED an. Es kann somit jede LED mit einer eigenen Farbe und Helligkeit gesteuert werden. Einziger Nachteil ist die nötige hohe Bitrate von ca. 800 kHz für die Übertragung der Daten. Arduinos und kleinere Mikrokontroller haben zuweilen Mühe das Timing bei längeren LED-Streifen einzuhalten. Das Netzteil liefert 5V mit einer maximalen Leistung von 350W (70A). Um diese grosse Leistung an die LED zu übertragen, werden vier Einspeisepunkte verteilt entlang des LED-Streifens angebracht.
Hardware
Die Computerhardware mit dem Spark.Core fertig vorhanden und bedarf hier keiner weiteren Erklärung. Für die Lampe selber sind ein paar Erläuterungen hilfreich.
Die LED-Streifen sind selbstklebend. Idealerweise werden Sie auf ein Trägerrohr mit passendem Durchmesser geklebt. Dieses sollte einen Durchmesser haben bei dem die LEDs exakt zwischen Trägerrohr und Lampenglas passen. Als weitere Schwierigkeit kommt dazu, dass die LEDs idealerweise gerade in einer Kolonne und leicht schräg nach rechts zu liegen kommen. So wird eingespielter Text leichter lesbar. Da Text für mein Projekt nicht wichtig ist, habe ich die LEDs auf ein mit Styropormatte aufgedicktes Kartonrohr geklebt. Man kann auf den Fotos gut erkennen, dass es keine gerade Kolonne um unteren Bereich gibt. Das ist in der weichen Struktur der Styropormatte begründet.
Die Beschaffung eines durchsichtigen, Milchglas-artigen Rohres ist für Private durchaus mit hohen Hürden verbunden. Solche Rohre sind meist nur von Grosshändlern erhältlich, die kaum mit privaten Abnehmern geschäften wollen. Ausserdem ist der Preis kaum interessant.
Zu meinem Glück verkauft die Migros in der Sparte Micasa eine passende Lampe mit einem Durchmesser von 150mm und ca. 1.6m Höhe. Der Preis von CHF 150 ist zwar deftig, jedoch ist darin auch gleich ein metallener Sockel enthalten. Die Länge des Rohres war zu lang und wurde entsprechend gekürzt. Der Deckel, die Halterung des Lüfters und des Controllers wurde mittels eines 3D-Druckers hergestellt. Hier zeigt sich dessen Überlegenheit beim Konstruieren um Sonderformen in Kürze herzustellen.
Der Sockel wurde um eine CNC-gefräste Holzkonstruktion erweitert, die das Netzteil trägt und die Basis für das Rohr mit den LEDs bildet.
Software
Die ursprüngliche Software ist darauf ausgelegt, einen LED-Streifen mit ca. 720 LEDs zu steuern. Das ist momentan die maximale Anzahl LEDs die der Core bezüglich RAM verwalten kann, ohne auf weitere Features wie Text und Fackelanimation zu verzichten. Diese Variante geht hier einen etwas anderen Weg. Die Software generiert dynamische und statische LED-RGB-Daten. Dynamische Daten werden kurz vor Übermittlung noch modifiziert oder Aufgrund einer Simulation verändert. Statische RGB-Daten werden on the fly berechnet und übermittelt, benötigen daher kein RAM für jede LED.
Dazu zwei Beispiele:
Fackel-Modus: Die Software simuliert eine Fackel mit einer glühenden Basis und einer dynamischen Entwicklung der ‚Flammen‘ die nach oben steigen. Diese ist im Original rund 720 LED lang (Anzahl LEDs pro Umfang x Anzahl Wicklungen). Da diese Fackel mit 1200 LEDs ausgerüstet ist, behelfe ich mich mit einem Teilbereich aus den ersten 720 LEDs und hänge diesen an dessen Ende. Dieser Beschiss ist nur beim Starten der Lampe auffallend wenn der obere Abschnitt zeitgleich ebenfalls Licht ausstrahlt. Sind alle LEDs aktiv fällt das kaum mehr auf.
Cycle-Modus: Dieser Modus macht nichts anderes als alle Farben durch den LED-Streifen zu schieben. Man erhält somit eine bunte Säule in der viele Farben nach oben steigen. Da sich die Startparameter mit jedem Durchgang (10ms) etwas ändern, verändern sich auch die Farben für jede LED. Diese Ansteuerung ist statisch, da keine LED-RGB-Daten gespeichert werden müssen.
Dieser elektronische Schalter ist klein und hat ein separates Bedienpanel. Damit bleiben die Wege vom Akku zum Verbraucher kurz, und das Bedienteil kann an geeigneter Stelle im Modell montiert werden. Die Akkuspannung wird mittels zweier LED dauernd signalisiert und dank stromsparendem Mikroprozessor kann der Schalter dauerhaft am Akku verbleiben.
Ich wollte für meinen kleinen Segler einen Schalter, der mir neben dieser Grundfunktion auch noch Angaben über die momentane Spannungslage des Akkus machen kann. Zuerst sind die Eckdaten, wenn auch nur grob, festzulegen.
Pflichtenheft
Betriebsspannung 3.6-7V (Arbeitsbereich von 4-5 Zellen NiCd/Mh)
minimaler Strom 3A Dauer / 10A Peak - Statusanzeige der Akkuspannung über verschieden farbige LEDs (Grün-Rot)
einfache mechanische Herstellung wegen eingeschränkten Fertigungsmöglichkeiten (Einseitige Printplatte)
Einsatz vom SMD Technologie
Verwendung eines Mikrokontroller
als Besonderheit sollen der Taster und die beiden LEDs auf einer separaten Platine montiert sein und mit einem Kabel zur Hauptplatine verbunden werden.
Wunschliste
- stetiger Verbleib am Akku auch nach dem Flug und bei Lagerung im Hobbykeller
- Statusanzeige der Akkuspannung während der Lagerung
- Möglichkeit für den Betrieb mit anderen Akkutypen / Zellenanzahl
Entwicklungschritte
Als Mikrokontroller habe ich mir die Reihe ATTiny von Atmel ausgesucht. Für diese sind viele professionelle Programme verfügbar, die zuweilen mit limitierten Funktionsumfang auch kostenlos genutzt werden können. Im diesem konkreten Fall ist es der Atmel ATTiny13V. Was dieser uP zum Leben braucht ist schnell beisammen; Spannung zwischen 1.8 und 5.5V und ein bei der vorgesehenen Beschaltung den Pullupwiderstand für den Reset-Pin.
Der ATiny13V besitzt mit der Grösse von 8X8mm einen ausgewachsenen 8-Bit Prozessor, 1kB Flash-ROM für das Programm, 128 Byte RAM für temporäre Programmdaten, 128 Byte EEPROM für Daten die auch nach dem Auschalten erhalten bleiben (ich komme darauf zurück), sowie 5 A/D Wandler. Der Baustein besitzt noch weitere, hier nicht erwähnte Funktionen und dafür braucht er gerade mal acht! externe Anschlüsse (SOIC8).
Funktionsweise
Über einen Taster soll der Schalter bedient werden. Im eingeschalteten Zustand soll die eine LED (grün) diesen Betriebszustands mit Dauerlicht anzeigen. Die zweite LED (rot) signalisiert die aktuelle Spannungslage des Akkus. Damit während des Fluges und beim Hantieren mit dem Modell keine ungewollten Schaltzustände auftreten, muss der Schalter wie folgt aktiviert und deaktiviert werden;
- Einschalten: Taste länger als 0.5 sek. im ausgeschalteten Zustand drücken
- Ausschalten: frühestens nach 3 sek. ohne Tastendruck, den Taster drücken bis die grüne LED schnell zu blinken beginnt (1 Sek.), jetzt den Taster wieder loslassen und die zweite Blinkfrequenz abwarten. Dann nochmals den Taster drücken: AUS.
Bilder
Downloads
PCB Files
BASCOM Source
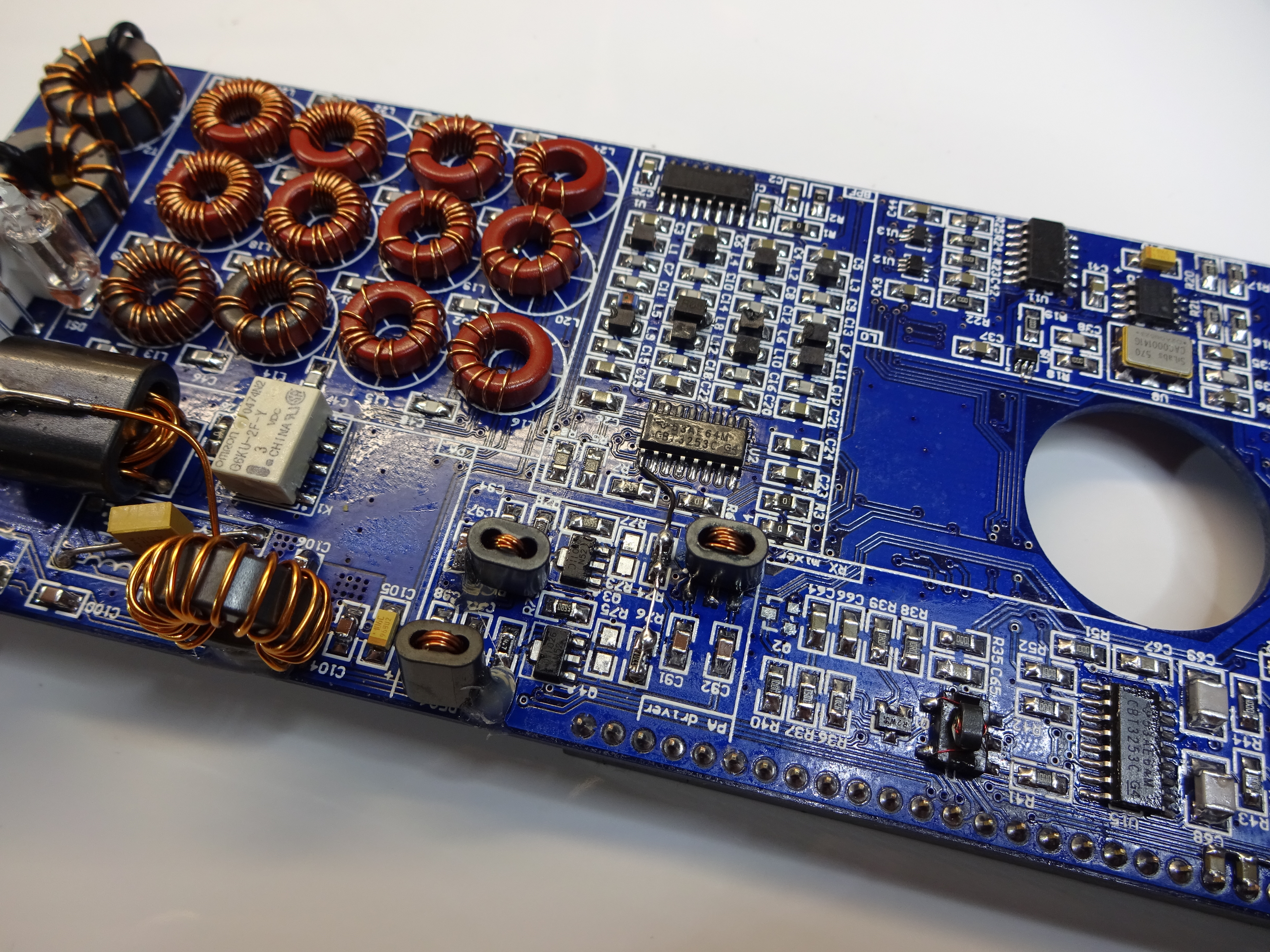
Kurz nachdem ich mich dazu entschlossen habe die Amateuerfunkprüfung zu absolvieren, bin ich auf das Projekt mcHF gestossen. Der englische Funkamateur M0NKA hat während zwei Jahren einen Transceiver entwickelt, der von 80m bis zum 10m Band sendet. Auf gerade mal zwei Platinen in der Grösse 186 x 66mm ist die ganze Elektronik verbaut.
Das Projekt ist Open-Source. Einzig die Platinenlayouts sind nicht frei verfügbar. Software und Schema aber schon. Bestellen kann man entweder die leeren Platinen oder das komplette Set mit allen Bauteilen. Mittlerweile sind auch teilbestückte Kits bestellbar. Ich habe mir einen Kit mit allen Bauteilen bestellt. Gerade in der Schweiz ist die Beschaffung von elektronischen Komponenten zum Teil schwierig, weil nicht jeder Distributor alle erforderlichen Teile führt.
Der Aufbau ist nicht zu unterschätzen. Es sind mehrere hundert Teile zu bestücken, davon einige die erst noch vorbereitet werden müssen. Wichtig ist eine gute Lötstation. Dazu gutes Lötzinn (0.5mm und 1.5 mm) und das richtige Flussmittel. Wer eine Heissluft-Lötstation hat, kann die ein/zwei schwierigen Bauteile fehlerfrei auflöten. Die Bauteile in meinem Kit kamen gruppiert verpackt in Ziplock-Säckchen mit einem Zettel darin welche Bauteilenummer enthalten sind. Also ein Säckchen mit R1-R3 mit 4k7, ein anderes mit R4,R8,R12 mit 10k und so weiter. Das ist eine grosse Hilfe beim Bestücken. Mittlerweile existieren diverse Modifikationen, die Fehler im Design beheben als auch Erweiterungen enthalten. Hier empfiehlt es sich, vorher in den unten genannten Foren nachzulesen. Mein mcHF hatte kaum Fehler im Aufbau (dank der guten Lötarbeit) und mittlerweile ist auch ein Gehäuse entstanden.
Preislich lohnt sich der Aufwand kaum. Ein Yaesu FT-817ND kostst in etwa dasselbe und bringt auch VHF/UHF mit . Natürlich fehlen dem die grafischen Anzeigen und die Erweiterbarkeit als Ganzes. Ich für mich habe das als Gelegenheit genommen, mich in die Funkhardware einzuarbeiten. Das mcHF wird für mich das Ferienfunkgerät werden, es ist kompakt, kann digitale Modes und passt auch mal in eine Wandertasche.
Donnerstag, 22 Januar, 2026
In den Ferien habe ich meist zwei Typen von Antennen dabei. Einmal eine FUCHS-Antenne mit 20m Draht sowie die AlexLoop, eine magnetische Loop-Antenne. Beide haben ihre Vor- und Nachteile. Der grösste Nachteil ist die schmale Bandbreite der Loop-Antenne. Bei jedem Frequenzwechsel muss neu eingestellt werden. Meist platziert man darum die Loop in nächster Nähe zum OM der mit QRP sendet. Falls wegen des Wetters man lieber drinnen bleibt braucht man aber etwas um draussen die Antenne abzustimmen.
Die Idee einer Fernsteuerung ging mir schon seit Monaten im Kopf herum.
Was es braucht:
- Getriebemotor mit sehr langsamer Drehzahl (wirklich langsam)
- Funkfernbedienung mit zwei oder mehr Kanälen
- Elektronik zum Steuern des Motors
- Mechanische Teile um den Einstellknopf der AlexLoop zu drehen
Nach einiger Suche habe ich die passenden Teile gefunden.
Getriebemotor: Conrad Bestell-Nr.: 1289388 Hst.-Teile-Nr.: G1000 | EAN: 4037373693313
Fernbedienung: https://hobby-elektronik.ch/Module-Sensoren/Funk-Netzwerk-RFID/433-Mhz-Fernbedienung-4-Kanal-Lernfaehig-mit-Empfaenger::705.html
Motorsteuerung: https://www.itead.cc/mboard.html / Dieses Teil hatte ich schon Jahre früher mal bestellt
Mechanische Teile: konstruiert auf Alibre 3D CAD und hergestellt mit einem Ultimaker 3D+ Drucker
Wie es funktioniert:
Das Hauptproblem war die Verbindung vom Getriebemotor zum Drehknopf der AlexLoop. Einfach den Knopf zu entfernen und direkt mit dem Motor zu verbinden wäre zwar einfach. Leider hat man keine Möglichkeit die Endpositionen des Drehkondensators der AlexLoop festzustellen. Der Motor hat ein 1000:1 Getriebe. Trotz des kleinen Motors treten auf der Abtriebsachse enorme Drehmomentkräfte auf, die Getriebe und Drehkondensator beschädigen könnten. Am einfachsten wäre eine Rutschkupplung.
Die Lösung:
Früher gab es Mopeds der Marke VéloSolex wo ein Reibrad das Vorderrad antrieb. Hier verwende ich einen Schleifkörper wie sie zum Beispiel von Dremel oder Proxxon erhältlich sind. Geht der Drehkondensator in eine Endstellung, dreht der Schleifkörper einfach durch und kann nichts beschädigen.
Komplett montierte Teile an der AlexLoop. Der Klemmring zieht über die Gummis das Reibrad zum Knopf

Bewegliche Teile mit Motor und Schleifkörperhalter
Alle Teile zusammen
Ein kleiner USB-Powerbank als Energielieferant
Arduino kompatibles Board mit H-Brückenschaltung
Video
Steuerung:
Als Steuerung verwende ich ein MBOARD welches eine H-Brückenschaltung für den verwendeten Bürstenmotor enthält. Die Fernsteuerung hat vier Knöpfe welche die digitalen Ausgänge auf der Fernbedienung steuern. Beim Drücken der Knöpfe wird zusätzlich ein ‘received valid data’ Ausgang aktiviert, der von der Software ausgewertet wird. Zwei Knöpfe drehen den Motor mit voller Geschwindigkeit, die beiden anderen senden zuerst einen kleinen Impuls und lassen dann den Motor mit verringerter Geschwindigkeit drehen.
Selbstverständlich kann man jegliche Motorsteuerung verwenden. Das Hauptziel war jedoch, einen Antrieb mit einer sehr kleinen Drehzahl und zwei Geschwindigkeiten zu verwenden.
3D Teile
Downloads
3D Teile STL Dateien
Software
Der Deckel schliesst den unteren Bereich der Haube und bildet so ein geschlossenes Segment, dass den Drehkondensator schützt.
Basiert auf 40m - 15m Magnetloop - mit Steuerung übers Koaxialkabel
In dieser für das Monoband 15m ausgelegte Modell wird ein Kondensator mit einer variablen und einer festen Kapazität verwendet.
Die Elektronik wurde ebenfalls angepasst und erhielt zusätzlichen Schutz vor HF-Einstrahlungen.